SÉRIE QUICK CHANGER – QCA-25 Un dispositif de changement rapide à l'extrémité d'un robot



Catégorie principale
Changeur d'outils robotisé / Changeur d'outils en bout de bras (EOAT) / Système de changement rapide / Changeur d'outils automatique / Interface d'outillage robotisé / Côté robot / Côté pince / Flexibilité de l'outillage / Déverrouillage rapide / Changeur d'outils pneumatique / Changeur d'outils électrique / Changeur d'outils hydraulique / Changeur d'outils de précision / Mécanisme de verrouillage de sécurité / Effecteur terminal / Automatisation / Efficacité du changement d'outils / Échange d'outils / Automatisation industrielle / Outillage en bout de bras robotisé / Conception modulaire
Application
Les outils de préhension (EOAT) sont largement utilisés dans des secteurs tels que l'automobile, l'électronique grand public, la logistique, le moulage par injection, l'emballage alimentaire et pharmaceutique, et la transformation des métaux. Leurs principales fonctions comprennent la manutention des pièces, le soudage, la pulvérisation, le contrôle qualité et le changement rapide d'outils. Les EOAT améliorent considérablement l'efficacité de la production, la flexibilité et la qualité des produits, ce qui en fait un élément essentiel de l'automatisation industrielle moderne.
Fonctionnalité
Haute précision
Le piston de réglage côté pince assure le positionnement, garantissant une grande précision de répétabilité. Des tests sur un million de cycles démontrent que la précision réelle est bien supérieure à la valeur recommandée.
Haute force
Le piston de verrouillage, doté d'un cylindre de grand diamètre, offre une force de verrouillage élevée, tandis que le dispositif de verrouillage rapide du robot SCIC présente une forte résistance au couple. Lors du verrouillage, l'absence de vibrations dues aux mouvements à grande vitesse évite les défaillances et garantit une précision de positionnement répétée.
Haute performance
Le mécanisme de verrouillage à surface multiconique, les composants d'étanchéité à longue durée de vie et la sonde de contact élastique de haute qualité sont utilisés pour assurer un contact étroit avec le module de signal.



Paramètre de spécification
| Série Quick Changer | ||||
| Modèle | Charge utile maximale | Chemin de gaz | Force de verrouillage à 80 psi (5,5 bar) | Poids du produit |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,4 kg |
| QCA-05 | 5 kg | 6-M5 | 620N | 0,3 kg |
| QCA-15 | 15 kg | 6-M5 | 1150N | 0,3 kg |
| QCA-25 | 25 kg | 12-M5 | 2400N | 1,0 kg |
| QCA-35 | 35 kg | 8-G1/8 | 2900N | 1,4 kg |
| QCA-50 | 50 kg | 9-G1/8 | 4600N | 1,7 kg |
| QCA-S50 | 50 kg | 8-G1/8 | 5650N | 1,9 kg |
| QCA-100 | 100 kg | 7-G3/8 | 12000N | 5,2 kg |
| QCA-S100 | 100 kg | 5-G3/8 | 12000N | 3,7 kg |
| QCA-S150 | 150 kg | 8-G3/8 | 12000N | 6,2 kg |
| QCA-200 | 300 kg | 12-G3/8 | 16000N | 9,0 kg |
| QCA-200D1 | 300 kg | 8-G3/8 | 16000N | 9,0 kg |
| QCA-S350 | 350 kg | / | 31000N | 9,4 kg |
| QCA-S500 | 500 kg | / | 37800N | 23,4 kg |

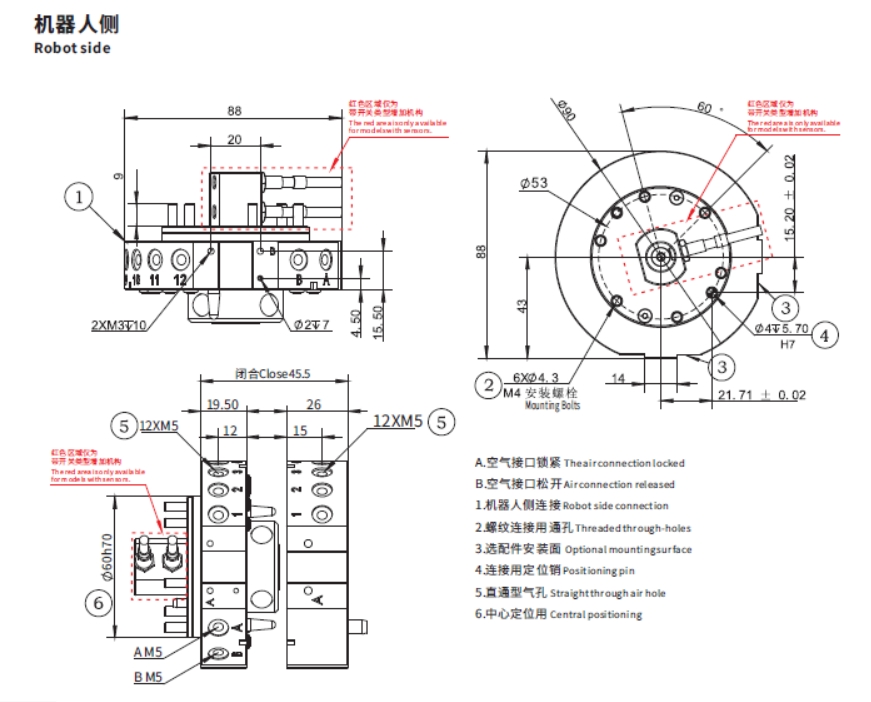
Côté robot

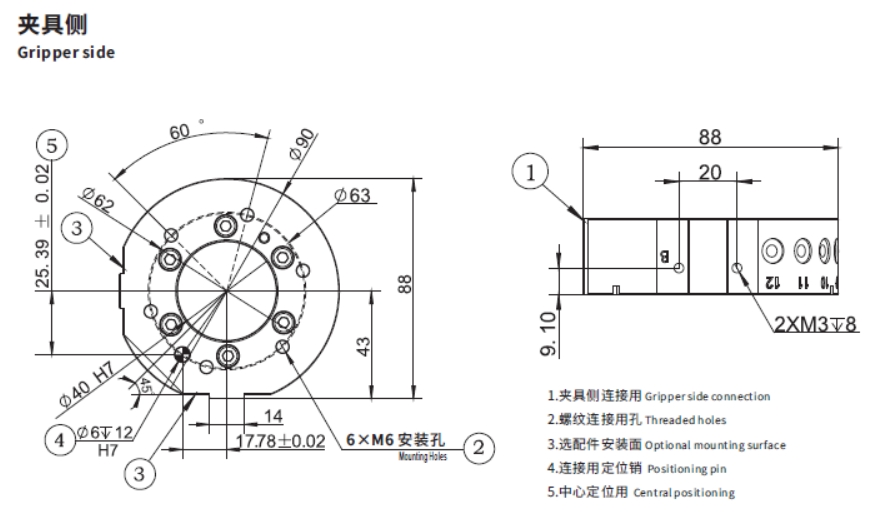
Côté antidérapant

Interrupteur latéral de la sangle du robot
Module applicable
Type de module
| Nom du produit | Modèle | PN | Tension de fonctionnement | Courant de fonctionnement | Connecteur | Connecteur PN |
| Module de signalisation latérale du robot | QCSM-15R1 | 7.Y00965 | 24V | 2,5 A | DB15R1-1000① | 1.Y10163 |
| module de signalisation latérale de la pince | QCSM-15G1 | 7.Y00966 | 24V | 2,5 A | DB15G1-1000① | 1.Y10437 |
① La longueur du câble est de 1 mètre
Module HF - Ligne de sortie directe
| Nom du produit | Modèle | PN |
| module haute fréquence côté robot | QCHFM-02R-1000 | 7.Y02086 |
| module haute fréquence côté pince | QCHFM-02G-1000 | 7.Y02087 |
Ligne de sortie droite du module électrique à 15 conducteurs
| Nom du produit | Modèle | PN |
| Module électrique à 15 noyaux côté robot | QCHFM-15R1-1000 | 7.Y02097 |
| module électrique à 15 noyaux côté pince | QCHFM-15G1-1000 | 7.Y02098 |
Module d'alimentation - Ligne de sortie directe
| Nom du produit | Modèle | PN |
| module haute fréquence côté robot | QCSM-08R-1000 | 7.Y02084 |
| module haute fréquence côté pince | QCSM-08G-1000 | 7.Y02085 |
Interface de câble réseau RJ45S
| Nom du produit | Modèle | PN |
| Module servo RJ455 côté robot | QCSM-RJ45*5M-06R | 7.Y02129 |
| Module servo RJ455 côté pince | QCSM-RJ45*5M-06G | 7.Y02129 |
Notre entreprise


Catégories de produits
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGI –...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE PGE –...
-

SÉRIE CHANGEUR RAPIDE – QCA-100 Un changeur rapide...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE PGE –...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGD –...
-

SÉRIE DE MODULES DE PRÉCISION – FPT Trois doigts...