Robot manipulateur collaboratif Szgh-Arm 2442co pour le chargement et le déchargement



Robot manipulateur collaboratif Szgh-Arm 2442co pour le chargement et le déchargement
Catégorie principale
Bras robotisé industriel / Bras robotisé collaboratif / Pince électrique / Actionneur intelligent / Solutions d'automatisation
Application
Les cobots SCIC Z-Arm sont des robots collaboratifs légers à 4 axes dotés d'un moteur d'entraînement intégré. Contrairement aux SCARA traditionnels, ils ne nécessitent plus de réducteurs, ce qui permet de réduire les coûts de 40 %. Les cobots SCIC Z-Arm peuvent réaliser des tâches telles que l'impression 3D, la manutention, le soudage et la gravure laser. Ils améliorent considérablement l'efficacité et la flexibilité de votre travail et de votre production.
Caractéristiques

Haute précision
Répétabilité
±0,02 mm
Charge utile importante
5 kg
Grande envergure
Axe JI 220 mm
Axe J2 200 mm
Prix compétitif
Qualité industrielle
Cprix compétitif
Produits associés



Paramètre de spécification
Le bras articulé SCIC Z-Arm 2442B, conçu par SCIC Tech, est un robot collaboratif léger, facile à programmer et à utiliser, compatible avec les kits de développement logiciel (SDK). De plus, il intègre un système de détection de collision : en cas de contact avec une personne, il s’arrête automatiquement, assurant ainsi une collaboration homme-machine intelligente et une sécurité renforcée.
| Bras robotique collaboratif Z-Arm 2442B | Paramètres |
| 1 longueur de bras d'axe | 220 mm |
| 1 angle de rotation de l'axe | ±90° |
| longueur du bras à 2 axes | 200 mm |
| angle de rotation sur 2 axes | ±164° (Optionnel : 15-345°) |
| course de l'axe Z | 240 (Hauteur personnalisable) |
| Plage de rotation de l'axe R | ±1080° |
| vitesse linéaire | 1600 mm/s (charge utile 4 kg) |
| Répétabilité | ±0,02 mm |
| charge utile standard | 4 kg |
| charge utile maximale | 5 kg |
| Degré de liberté | 4 |
| Alimentation électrique | Alimentation 220 V/110 V 50-60 Hz, puissance de crête 48 V CC : 200 W |
| Communication | Ethernet |
| Extensibilité | Le contrôleur de mouvement intégré offre 24 E/S + extension sous le bras |
| La hauteur de l'axe Z est personnalisable. | 0,1 m à 0,5 m |
| Enseignement du glissement sur l'axe Z | / |
| Interface électrique réservée | Configuration standard : câbles 24*23 AWG (non blindés) allant du panneau de prises à travers le couvercle du bras inférieur En option : 2 tubes à vide φ4 traversant le panneau de la douille et la bride |
| pinces électriques HITBOT compatibles | E-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Lumière respirante | / |
| Amplitude de mouvement du deuxième bras | Standard : ±164° Optionnel : 15-345° |
| Accessoires en option | / |
| Utiliser l'environnement | Température ambiante : 0-45°C Humidité : 20-80 % HR 85 (sans gel) |
| Port d'E/S entrée numérique (isolée) | 9+3+extension d'avant-bras (en option) |
| Sortie numérique du port d'E/S (isolée) | 9+3+extension d'avant-bras (en option) |
| Port d'E/S entrée analogique (4-20 mA) | / |
| Sortie analogique du port d'E/S (4-20 mA) | / |
| hauteur du bras robotisé | 683 mm |
| poids du bras robotisé | Course de 240 mm, poids net 27 kg |
| Taille de base | 250 mm x 250 mm x 15 mm |
| Distance entre les trous de fixation de la base | 200 mm x 200 mm avec quatre vis M8 x 20 |
| Détection de collision | √ |
| Enseignement du drag | √ |
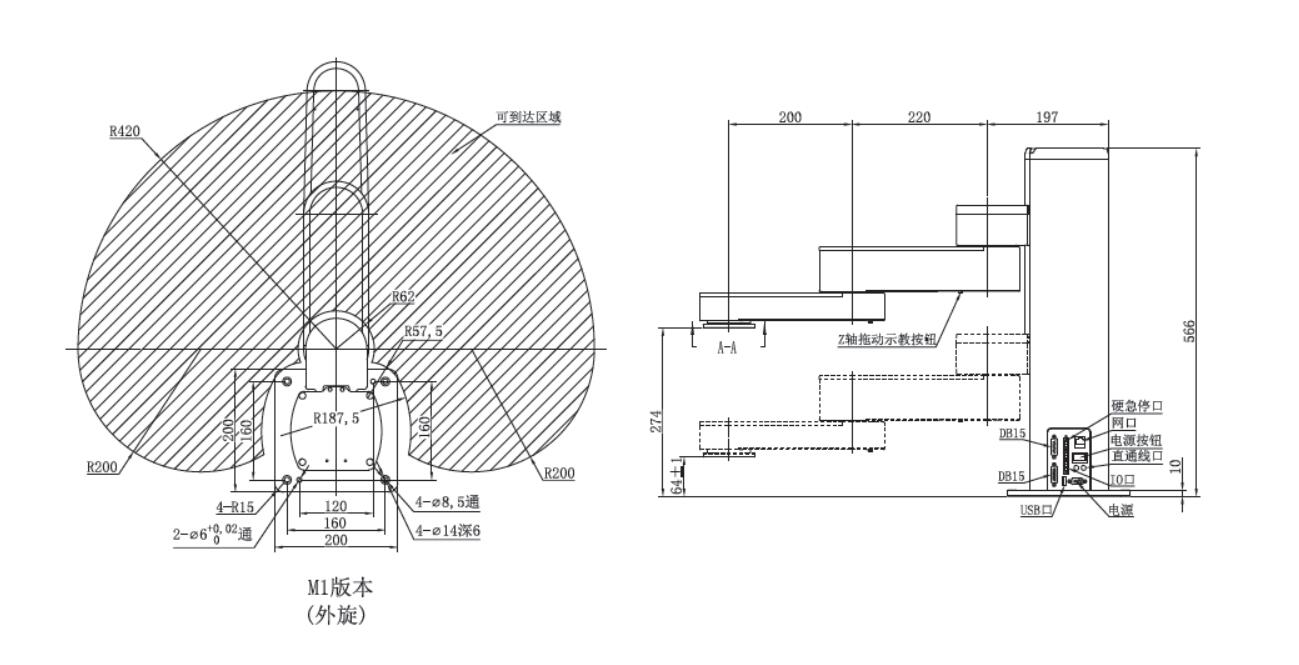
Plage de mouvement Version M1 (Rotation vers l'extérieur)
Introduction à l'interface

L'interface du bras robotique Z-Arm 2442 est installée à 2 endroits : sur le côté de la base du bras robotique (défini comme A) et à l'arrière du bras terminal. Le panneau d'interface A comporte une interface d'alimentation (JI), une interface d'alimentation 24 V DB2 (J2), une sortie vers le port d'E/S utilisateur DB15 (J3), un port d'E/S d'entrée utilisateur DB15 (J4) et des boutons de configuration d'adresse IP (K5). Il comprend également un port Ethernet (J6), un port d'entrée/sortie système (J7) et deux prises pour câbles à 4 conducteurs droits (J8A et J9A).
Précautions
1. Inertie de la charge utile
Le centre de gravité de la charge utile et la plage de charge utile recommandée avec l'inertie de mouvement de l'axe Z sont illustrés sur la figure 1.

Figure 1 Description de la charge utile de la série XX32
2. Force de collision
Force de déclenchement de la protection anti-collision des articulations horizontales : la force de la série XX42 est de 40 N.
3. Force externe selon l'axe Z
La force externe de l'axe Z ne doit pas dépasser 120 N.

Figure 2
4. Remarques concernant l'installation de l'axe Z personnalisé, voir la figure 3 pour plus de détails.

Figure 3
Avertissement :
(1) Pour un axe Z personnalisé à grande course, la rigidité de l'axe Z diminue à mesure que la course augmente. Lorsque la course de l'axe Z dépasse la valeur recommandée, que l'utilisateur a des exigences de rigidité et que la vitesse est supérieure à 50 % de la vitesse maximale, il est fortement recommandé d'installer un support derrière l'axe Z afin de garantir que la rigidité du bras robotisé réponde aux exigences à haute vitesse.
Les valeurs recommandées sont les suivantes : Course de l’axe Z de la série Z-ArmXX42 > 600 mm
(2) L'augmentation de la course de l'axe Z entraîne une réduction significative de la verticalité entre l'axe Z et la base. Si des exigences strictes de verticalité entre l'axe Z et la base ne sont pas applicables, veuillez consulter un technicien.
5. Brancher le câble d'alimentation à chaud est interdit. Attention : une inversion de polarité se produit lorsque les pôles positif et négatif de l'alimentation sont déconnectés.
6. Ne pas appuyer sur le bras horizontal lorsque l'appareil est hors tension.

Figure 4
Recommandation concernant le connecteur DB15

Figure 5
Modèle recommandé : mâle plaqué or avec boîtier ABS YL-SCD-15M ; femelle plaquée or avec boîtier ABS YL-SCD-15F
Dimensions : 55 mm × 43 mm × 16 mm
(Voir figure 5)
Table de préhension compatible avec les bras robotisés
| Modèle de bras robotisé n° | Pinces compatibles |
| XX42 T1 | Z-EFG-8S NK/Z-EFG-12 NK/Z-EFG-20 NM NMA/Z-EFG-20S/ Z-EFG-30NM NMA Impression 3D du 5e axe |
| XX42 T2 | Z-EFG-50 TOUS/Z-EFG-100 TXA |
Schéma des dimensions d'installation de l'adaptateur secteur
Alimentation XX42 configuration 24 V 500 W RSP-500-SPEC-CN

Schéma de l'environnement d'utilisation externe du bras robotisé

Notre entreprise


Catégories de produits
-

Bras robotique économique à 6 axes avec Megmeet Ehave ...
-

Manipulation par pince multi-stations à 6 axes Scara Rob...
-
Meilleur prix pour une machine de soudage robotisée à 6 axes...
-

Bras robotique CNC intelligent à 6 axes / bras mécanique...
-

Équipement de soudage robotisé automatique pour l'industrie du soudage...
-
Bras robotique mécanique en métal à 6 axes en promotion...