BRAS ROBOTIQUES SCARA – Bras robotique collaboratif Z-Arm-4160B





Catégorie principale
Bras robotisé industriel / Bras robotisé collaboratif / Pince électrique / Actionneur intelligent / Solutions d'automatisation
Application
Les cobots SCIC Z-Arm sont des robots collaboratifs légers à 4 axes dotés d'un moteur d'entraînement intégré. Contrairement aux SCARA traditionnels, ils ne nécessitent plus de réducteurs, ce qui permet de réduire les coûts de 40 %. Les cobots SCIC Z-Arm peuvent réaliser des tâches telles que l'impression 3D, la manutention, le soudage et la gravure laser. Ils améliorent considérablement l'efficacité et la flexibilité de votre travail et de votre production.
Caractéristiques

Haute précision
Répétabilité
±0,02 mm
Axe Z personnalisé
0,1-0,8 m
Charge utile importante
Support 4 kg
Max 5 kg
vitesse plus élevée
Vitesse linéaire maximale 2 m/s
(Charge admissible 5 kg)
Bras robotique à 4 axes de grande envergure et de haute précision, facile à utiliser
Haute précision
Répétabilité : ±0,02 mm
Grande envergure
Axe J1 : 325 mm,Axe J2 : 275 mm
Axe Z personnalisé
La course verticale peut être personnalisée entre 0,1 m et 0,8 m.
Gain de place
Le variateur/contrôleur est intégré
Simple et facile à utiliser
Même un novice qui ne connaît pas le bras robotisé peut facilement l'utiliser, l'interface est intuitive.
Grande vitesse
Sa vitesse est de 2000 mm/s sous une charge de 4 kg.

Produits associés



Paramètre de spécification
Le bras articulé SCIC Hitbot Z-Arm 4160B, conçu par SCIC Tech, est un robot collaboratif léger, facile à programmer et à utiliser, compatible avec les kits de développement logiciel (SDK). De plus, il intègre un système de détection de collision : en cas de contact avec une personne, il s’arrête automatiquement. Cette technologie permet une collaboration homme-machine intelligente et sécurisée.
| Bras robotique collaboratif Z-Arm 4160B | Paramètres |
| 1 longueur de bras d'axe | 325 mm |
| 1 angle de rotation de l'axe | ±90° |
| longueur du bras à 2 axes | 275 mm |
| angle de rotation sur 2 axes | ±164° Optionnel : 15-345° |
| course de l'axe Z | La hauteur de 410 peut être personnalisée. |
| Plage de rotation de l'axe R | ±1080° |
| vitesse linéaire | 2000 mm/s (charge utile 4 kg) |
| Répétabilité | ±0,02 mm |
| charge utile standard | 4 kg |
| charge utile maximale | 5 kg |
| Degré de liberté | 4 |
| Alimentation électrique | Alimentation 220 V/110 V 50-60 Hz, puissance de crête de 48 V CC : 960 W |
| Communication | Ethernet |
| Extensibilité | Le contrôleur de mouvement intégré offre 24 E/S + extension sous le bras |
| La hauteur de l'axe Z est personnalisable. | 0,1 m à 0,8 m |
| Enseignement du glissement sur l'axe Z | / |
| Interface électrique réservée | Configuration standard : câbles 24*23 AWG (non blindés) allant du panneau de prises à travers le couvercle du bras inférieur En option : 2 tubes à vide φ4 traversant le panneau de la douille et la bride |
| pinces électriques HITBOT compatibles | Z-EFG-8S/Z-EFG-12/Z-EFG-20/Z-EFG-20S/Z-EFG-20F/Z-ERG-20C/Z-EFG-30/Z-EFG-50/Z-EFG-100 |
| Lumière respirante | / |
| Amplitude de mouvement du deuxième bras | Standard : ±164° Optionnel : 15-345° |
| Accessoires en option | / |
| Utiliser l'environnement | Température ambiante : 0-45°C Humidité : 20-80 % HR (sans gel) |
| Port d'E/S entrée numérique (isolée) | 9+3+extension d'avant-bras (en option) |
| Sortie numérique du port d'E/S (isolée) | 9+3+extension d'avant-bras (en option) |
| Port d'E/S entrée analogique (4-20 mA) | / |
| Sortie analogique du port d'E/S (4-20 mA) | / |
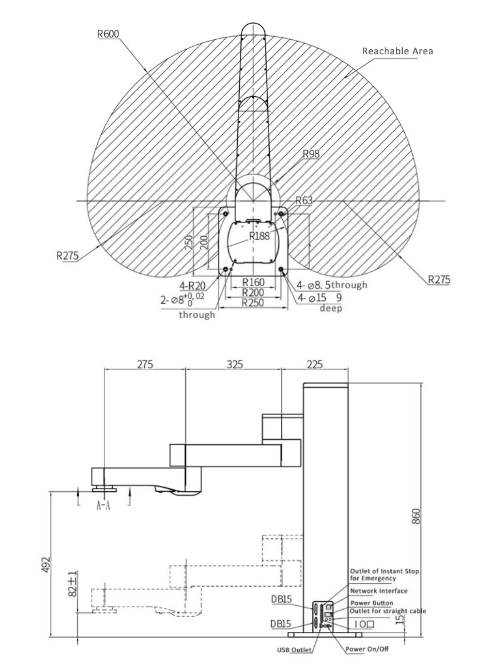
| hauteur du bras robotisé | 860 mm |
| poids du bras robotisé | Course de 410 mm, poids net 36,5 kg |
| Taille de base | 250 mm x 250 mm x 15 mm |
| Distance entre les trous de fixation de la base | 200 mm x 200 mm avec quatre vis M8 x 20 |
| Détection de collision | √ |
| Enseignement du drag | √ |
Choix idéal pour les tâches d'assemblage légères
Le Z-Arm XX60B est un bras robotisé à 4 axes avec une grande envergure, occupant une petite surface, très adapté à une installation sur un poste de travail ou à l'intérieur d'une machine, c'est un choix idéal pour les tâches d'assemblage légères.


Léger avec un grand angle de rotation

Le poids du produit est d'environ 36,5 kg, sa charge maximale peut atteindre 5 kg, l'angle de rotation de l'axe 1 est de ±90°, l'angle de rotation de l'axe 2 est de ±164°, la plage de rotation de l'axe R peut atteindre ±1080°.
Grande envergure, large application

Le bras Z-Arm XX60B possède une grande envergure, la longueur de l'axe 1 est de 325 mm, la longueur de l'axe 2 est de 275 mm, sa vitesse linéaire peut atteindre 2000 mm/s sous une charge de 4 kg.


Déploiement facile, transition rapide
Le bras en Z XX60B présente les caractéristiques suivantes : léger, compact et flexible à déployer, il convient à de nombreuses applications et ne modifierait pas l'agencement de production précédent, notamment en permettant un changement rapide de la séquence de processus et la réalisation de petits lots de production, etc.
DragTeaching pour terminer le programme

Le logiciel est basé sur une conception graphique et propose des modules fonctionnels de base tels que des points, des signaux de sortie, des pinces électriques, des plateaux, des temporisations, des sous-processus et des fonctions de réinitialisation. Les utilisateurs peuvent glisser-déposer ces modules pour contrôler le bras du robot dans la zone de programmation. L'interface est simple, mais les fonctionnalités sont puissantes.
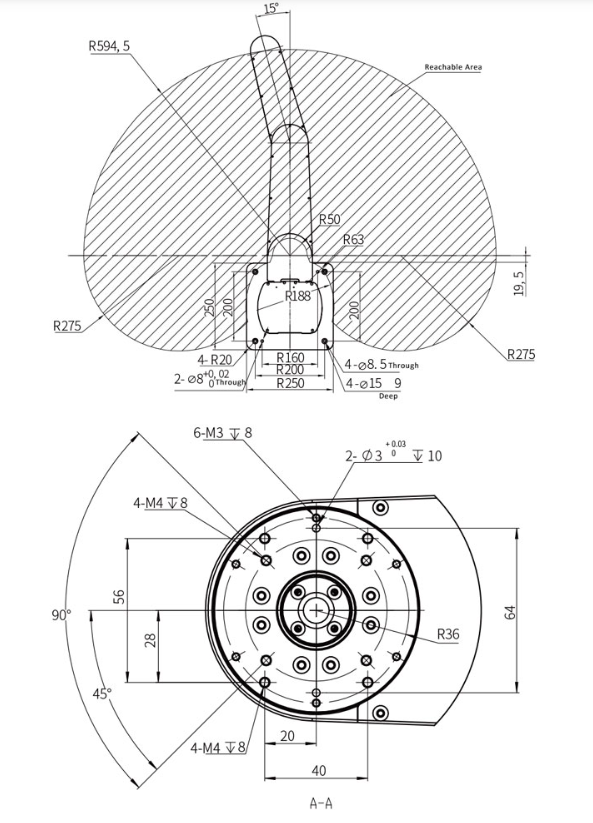
Plage de mouvement Version M1 (Rotation vers l'extérieur)
Recommandation concernant le connecteur DB15

Modèle recommandé : mâle plaqué or avec boîtier ABS YL-SCD-15M ; femelle plaquée or avec boîtier ABS YL-SCD-15F
Dimensions : 55 mm × 43 mm × 16 mm
(Voir figure 5)
Schéma de l'environnement d'utilisation externe du bras robotisé

Notre entreprise


Catégories de produits
-

SÉRIE CHANGEUR RAPIDE – QC-150 Manuel rond...
-

ROBOTS DE LEVAGE – Robot de levage rotatif SJV...
-

CHARIOT ÉLÉVATEUR INTELLIGENT – SFL-CDD14-CE Laser SLAM ...
-

SÉRIE DE COBOTS IA TM – Cobot IA TM12M à 6 axes
-

SÉRIE DE COBOTS IA TM – Cobot IA TM16M à 6 axes
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-30 Paral...