SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Pince électrique parallèle Z-EFG-20


Catégorie principale
Bras robotisé industriel / Bras robotisé collaboratif / Pince électrique / Actionneur intelligent / Solutions d'automatisation
Application
Les pinces robotisées de la série SCIC Z-EFG, de petite taille et dotées d'un système servo intégré, permettent un contrôle précis de la vitesse, de la position et de la force de serrage. Le système de préhension de pointe SCIC pour solutions d'automatisation vous ouvre de nouvelles perspectives pour automatiser des tâches que vous n'auriez jamais cru possibles.

Fonctionnalité

Contrôleur intégré
• Course et force de préhension réglables
L'extrémité peut être remplacée pour s'adapter à différents besoins.
Ramassez les objets fragiles et déformables tels que les œufs,tubes à essai, anneaux, etc.
·S'appliquer aux scènes sans source d'air (par exemple, laboratoire, hôpital)
Précision du contrôle, serrage précis même dans les espaces réduits, serrage rapide et stable
Force de serrage élevée
Course totale : 20 mm, force de serrage : 80 N.
Précision du contrôle
Répétabilité : ±0,02 mm
Longue durée de vie
Des dizaines de millions de cycles, au-delà de la pince à air comprimé
La manette est intégrée
Peu encombrant, facile à intégrer.
Mode de contrôle
Contrôleurs d'E/S Pulse en option
Serrage souple
Il peut fixer des objets fragiles




Paramètre de spécification
| Modèle n° Z-EFG-20 | Paramètres |
| Total accident vasculaire cérébral | 20 mm |
| Force de préhension | 30~80N |
| Répétabilité | ±0,02 mm |
| Poids de préhension recommandé | 0,8 kg |
| Transmission mode | Crémaillère + Guide-rouleau transversal |
| Graissage des pièces mobiles | Tous les six mois ou 1 million de mouvements par période |
| Temps de déplacement unidirectionnel | 0,45s |
| Plage de températures de fonctionnement | 5-55℃ |
| Plage d'humidité de fonctionnement | RH35-80(Pas de gel) |
| Mode de mouvement | Deux doigts se déplacent horizontalement |
| Contrôle des mouvements de la tête fémorale | Réglable |
| Réglage de la force de serrage | Réglable |
| Poids | 0,458 kg |
| Dimensions(L*l*H) | 44*30*124,7 mm |
| Placement du contrôleur | Intégré |
| Pouvoir | 5W |
| Type de moteur | CC sans balais |
| Courant de crête | 1A |
| Tension nominale | 24V |
| Courant de veille | 0,2A |
| Résistant aux chocs / résistant aux vibrations | 98 m/s |
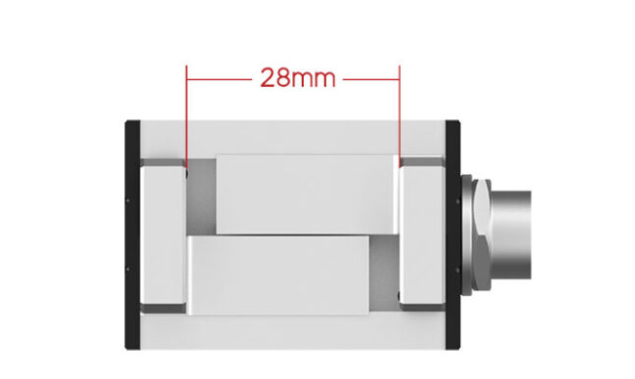
| Diamètre du moteur | 28 mm |
* Force de préhension Z-EFG-20 : La force de préhension peut être ajustée en ajoutant un matériau à déformation contrôlée à l'avant du dispositif, obtenu selon la courbe correspondante de déformation et de force.
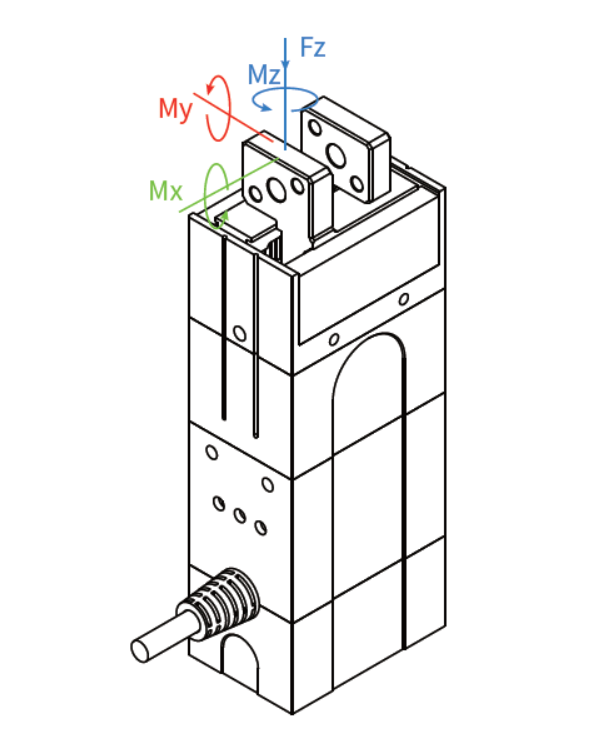
| Charge statique admissible dans la direction verticale | |
| Fz : | 150N |
| Couple admissible | |
| Mx : | 2,1 Nm |
| Mon: | 2,34 Nm |
| Mz : | 2 Nm |
Force de serrage élevée, contrôle précis de la force

La pince électrique adopte une conception de transmission spéciale et une compensation de calcul d'entraînement, sa force de serrage est de 80 N réglable en continu, sa course totale est de 20 mm et sa répétabilité est de ±0,02 mm.
Mode de mouvement et course réglables
Le mouvement de la pince électrique est un mouvement parallèle à deux doigts, son temps de course le plus court est de seulement 0,45 s, le poids de serrage ≤ 0,8 kg, il peut répondre aux exigences de serrage stable pour la ligne de production.
Structure compacte, installation facile.

Les dimensions du Z-EFG-20 sont L40*l30*H124,7 mm, sa structure est compacte, il prend en charge plus de cinq modes d'installation, son contrôleur est intégré, il occupe peu d'espace, ce qui permet d'effectuer facilement diverses tâches de serrage.


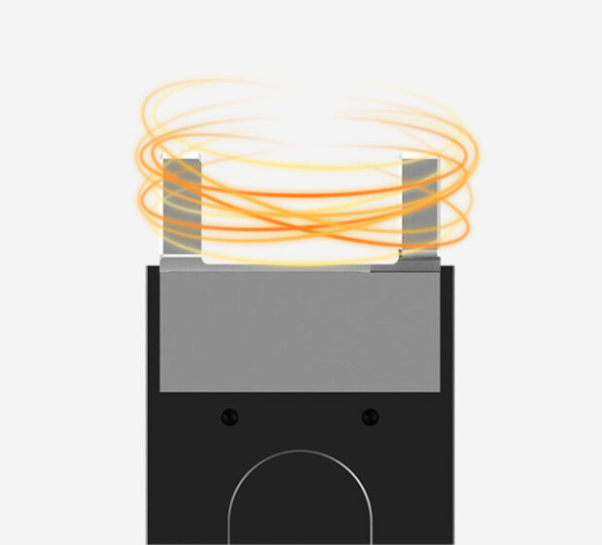
Système de commande et de pilotage intégré, serrage souple

La queue du Z-EFG-20 peut être modifiée facilement, les clients peuvent fixer les objets de leur choix, concevoir la queue et conserver la pince électrique pour effectuer les tâches de serrage dans la mesure du possible.
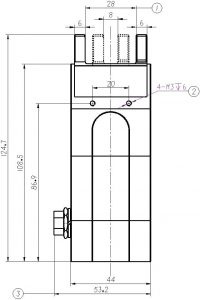
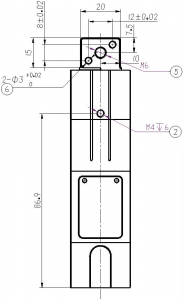
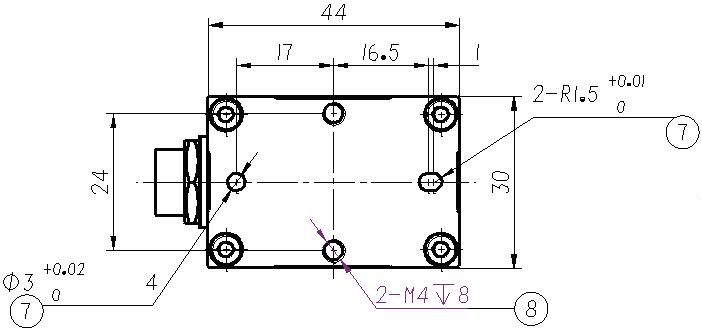
Schéma d'installation des dimensions
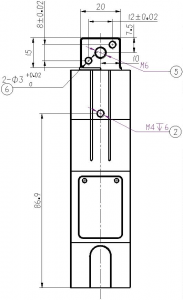
① Mouvement des doigts de la pince
② Position de montage latéral (trou fileté)
③ Emplacement du câblage de la prise d'aviation
④ Position de la force de réglage de la pince (à gauche) et du voyant lumineux (à droite)
⑤ Position d'installation de la pince (trou fileté)
⑥ Position d'installation de la pince (trou de goupille)
⑦ Position de montage inférieure (trou de goupille)
⑧ Position de montage inférieure (trou fileté)
Notre entreprise


Catégories de produits
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-C5...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE PGE –...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGI –...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGI –...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGI –...
-

DH ROBOTICS SERVO-GRIPPER ÉLECTRIQUE SÉRIE PGC –...