SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Pince électrique parallèle Z-EFG-26



Catégorie principale
Bras robotisé industriel / Bras robotisé collaboratif / Pince électrique / Actionneur intelligent / Solutions d'automatisation
Application
Les pinces robotisées de la série SCIC Z-EFG, de petite taille et dotées d'un système servo intégré, permettent un contrôle précis de la vitesse, de la position et de la force de serrage. Le système de préhension de pointe SCIC pour solutions d'automatisation vous ouvre de nouvelles perspectives pour automatiser des tâches que vous n'auriez jamais cru possibles.

Fonctionnalité
• Détection de chute de la pince, fonction de sortie de zone
La force, la position et la vitesse peuvent être contrôlées avec précision via Modbus.
• Longue durée de vie : des dizaines de millions de cycles, surpassant les griffes aériennes
Contrôleur intégré : encombrement réduit, intégration facile
Mode de contrôle : 485 (Modbus RTU), E/S
La force de serrage et la vitesse peuvent être contrôlées avec précision par Modbus.
Application multiple
Il est doté d'un système de détection de chute de tension et d'une sortie de district.
Précis pour le contrôle
La force de serrage, le diamètre du trou et la vitesse peuvent être contrôlés par Modbus.
Longue durée de vie
Des dizaines de millions de cycles, au-dessus de la pince à air
Contrôleur intégré
Peu encombrant, facile à intégrer.
Réactivité rapide
Le temps le plus court d'un seul coup est de seulement 0,25 s.
Serrage souple
Il peut maintenir en place des objets fragiles, tels qu'un œuf, un verre, etc.




Paramètre de spécification
Le Z-EFG-26 est une pince parallèle électrique à 2 doigts, de petite taille mais puissante pour saisir de nombreux objets mous tels que des œufs, des tuyaux, des composants électroniques, etc.
● La pince électrique Z-EFG-26 possède un contrôleur intégré.
●Sa course et sa force de préhension sont réglables.
●Les terminaux peuvent être remplacés pour s'adapter à différentes exigences.
●Ramassez facilement les objets fragiles et déformables, tels que les œufs, les tubes à essai, les bagues, etc.
●Convient aux scènes sans source d'air (comme les laboratoires et les hôpitaux).
| Modèle n° Z-EFG-26 | Paramètres |
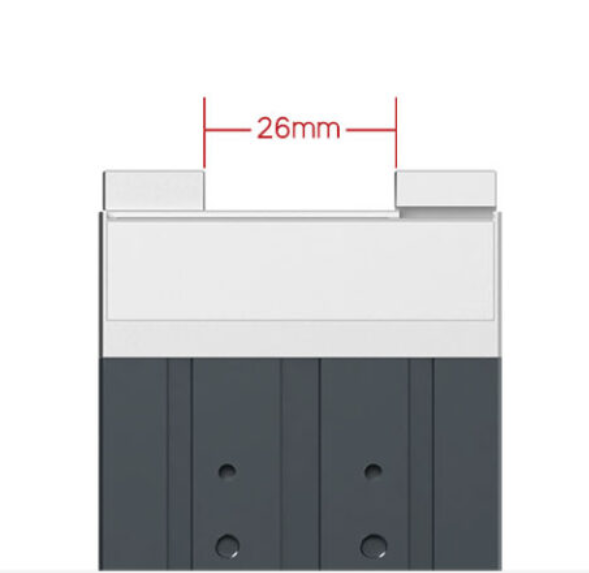
| Total accident vasculaire cérébral | 26 mm |
| Force de préhension | 6~15N |
| Répétabilité | ±0,02 mm |
| Poids de préhension recommandé | Max. 0,3 kg |
| Transmission mode | Crémaillère + Guide-rouleau transversal |
| Graissage des pièces mobiles | Tous les six mois ou 1 million de mouvements par période |
| Temps de déplacement unidirectionnel | 0,25s |
| Plage de températures de fonctionnement | 5-55℃ |
| Plage d'humidité de fonctionnement | RH35-80(Pas de gel) |
| Mode de mouvement | Deux doigts se déplacent horizontalement |
| Contrôle des mouvements de la tête fémorale | Réglable |
| Réglage de la force de serrage | Réglable |
| Poids | 0,45 kg |
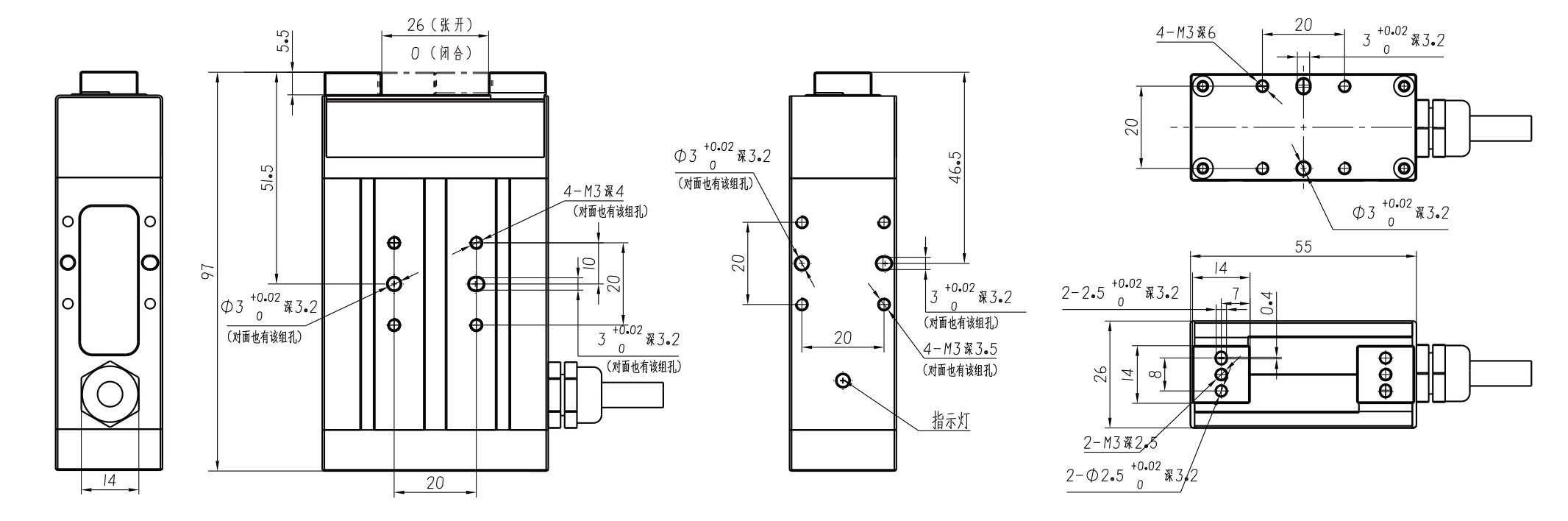
| Dimensions(L*l*H) | 55*26*97 mm |
| Placement du contrôleur | Intégré |
| Pouvoir | 10W |
| Type de moteur | CC sans balais |
| Courant de crête | 1A |
| Tension nominale | 24V |
| Courant de veille | 0,4A |
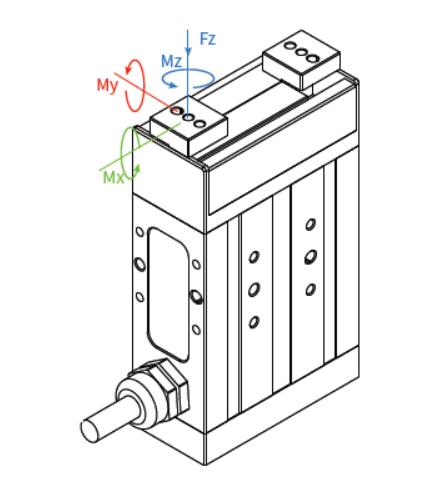
| Charge statique admissible dans la direction verticale | |
| Fz : | 250N |
| Couple admissible | |
| Mx : | 2,4 Nm |
| Mon: | 2,6 Nm |
| Mz : | 2 Nm |
Contrôle précis de la force, exactitude de la répétition

La pince électrique a adopté une conception de transmission spéciale et un calcul d'entraînement pour compenser, sa course totale est de 26 mm, sa force de serrage est de 6 à 15 N, la course et la force de serrage peuvent être ajustées, et sa répétabilité est de ±0,02 mm.
Réaction rapide, plus stable

Le temps minimal d'une seule course est de seulement 0,25 s, ce qui permet de répondre aux exigences de serrage rapide et stable des lignes de production.
Petite figurine, facile à intégrer

Les dimensions du Z-EFG-26 sont L55*l26*H97mm, sa structure est compacte, il prend en charge plus de cinq modes d'installation flexibles, il est doté d'un contrôleur intégré, occupe peu d'espace et peut facilement gérer de nombreuses tâches pour diverses exigences de serrage.

Système de commande et de serrage souple intégré

La partie arrière de la pince électrique peut être changée facilement, son poids de serrage est de 300 g, les clients peuvent concevoir spécialement la partie arrière de la pince pour répondre à leurs propres besoins de serrage, afin que la pince électrique puisse effectuer les tâches de serrage dans toute leur mesure.
Modes de contrôle multiples, utilisation facile

La configuration de la pince Z-EFG-26 est simple, elle dispose de nombreux modes de contrôle : 485 (Modbus RTU), Pulse, E/S, elle est compatible avec le système de contrôle principal PLC.

Schéma d'installation des dimensions
Notre entreprise


Catégories de produits
-

DH ROBOTICS SERVO-GRIPPER ÉLECTRIQUE SÉRIE PGS –...
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-C6...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGI –...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGI –...
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-20P Para...
-

SÉRIE DE MODULES DE PRÉCISION – FPT Deux doigts T...