SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Pince électrique collaborative Z-EFG-L



Catégorie principale
Bras robotisé industriel / Bras robotisé collaboratif / Pince électrique / Actionneur intelligent / Solutions d'automatisation
Application
Les pinces robotisées de la série SCIC Z-EFG, de petite taille et dotées d'un système servo intégré, permettent un contrôle précis de la vitesse, de la position et de la force de serrage. Le système de préhension de pointe SCIC pour solutions d'automatisation vous ouvre de nouvelles perspectives pour automatiser des tâches que vous n'auriez jamais cru possibles.

Fonctionnalité

Ouverture et fermeture rapides
• Manipulation en espace restreint, manipulation de marchandises fragiles
Pince électrique exclusive à course de 8 mm pour bras robotique à six axes
• Longue durée de vie : des dizaines de millions de cycles, surpassant les griffes aériennes
Contrôleur intégré : encombrement réduit, intégration facile
Mode de contrôle : entrées/sorties
Conception spéciale pour bras robotique à six axes, pince électrique à course de 12 mm
Plug and Play
Conception spéciale pour bras robotique à six axes
Haute fréquence
Le temps le plus court d'un seul coup est de seulement 0,2 s.
Conduite et commande intégrées
Système servo intégré, prêt à l'emploi
La manette est intégrée
Peu encombrant, facile à intégrer.
La queue peut être changée
Sa queue peut être modifiée pour répondre à diverses exigences.
Serrage souple
Il peut fixer les objets fragiles.

● Promouvoir une révolution dans le remplacement des pinces pneumatiques par des pinces électriques, première pince électrique avec système servo intégré en Chine.
● Remplacement idéal pour compresseur d'air + filtre + électrovanne + vanne d'étranglement + pince pneumatique
● Durée de vie à plusieurs cycles, conforme aux cylindres japonais traditionnels




Paramètre de spécification
Le Z-EFG-L est une pince robotique électrique à 2 doigts parallèles avec une force de préhension de 30 N, prenant en charge le serrage doux, comme la préhension d'œufs, de pain, de tubes de tétine, etc.
| Modèle n° Z-EFG-L | Paramètres |
| AVC total | 12 mm |
| Force de préhension | 30N |
| Répétabilité | ±0,02 mm |
| Poids de préhension recommandé | ≤0,5 kg |
| Mode de transmission | Crémaillère + Guide-rouleau transversal |
| Graissage des pièces mobiles | Tous les six mois ou 1 million de mouvements par période |
| Temps de déplacement unidirectionnel | 0,2s |
| Plage de températures de fonctionnement | 5-55℃ |
| Plage d'humidité de fonctionnement | RH35-80 (Hors gel) |
| Mode de mouvement | Deux doigts se déplacent horizontalement |
| Contrôle des mouvements de la tête fémorale | Non réglable |
| Réglage de la force de serrage | Non réglable |
| Poids | 0,4 kg |
| Dimensions (L*l*H) | 68*68*113,6 mm |
| Placement du contrôleur | Intégré |
| Pouvoir | 5W |
| Type de moteur | CC sans balais |
| Tension nominale | 24 V ± 10 % |
| Courant de crête | 1A |
| Bras robotique adaptable à six axes | UR, Aubo |
Bras robotisé à six axes, prêt à l'emploi
La pince électrique Z-EFG-L est compatible avec les bras robotiques collaboratifs les plus courants sur le marché ; elle possède un niveau de protection élevé et une capacité de charge importante.


Conduite et commande intégrées
Le Z-EFG-L est une petite pince électrique dotée d'un système servo intégré, avec une course de 12 mm et une force de serrage de 30 N. Un seul Z-EFG-L peut remplacer un compresseur d'air, un filtre, une électrovanne, une vanne d'étranglement et une pince pneumatique.
Petite figurine, facile à installer
La pince électrique Z-EFG-L mesure L68*l68*H113,6 mm, sa structure est compacte, elle prend en charge de multiples modes d'installation, son contrôleur est intégré, elle occupe peu d'espace et peut facilement répondre à diverses exigences en matière de tâches de serrage.


Réaction rapide, contrôle de précision
Le temps de course le plus court est de 0,45 s, sa partie arrière peut être changée facilement, les clients peuvent ajuster la pince électrique en fonction de leurs exigences de production.
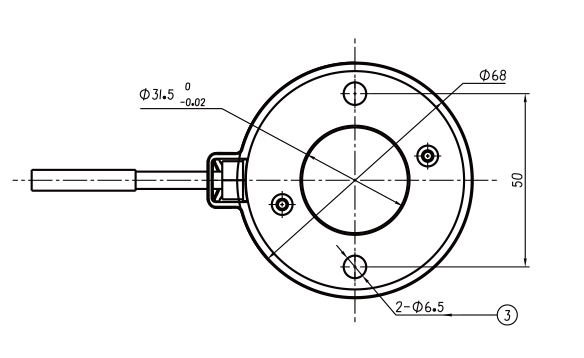
Schéma d'installation des dimensions
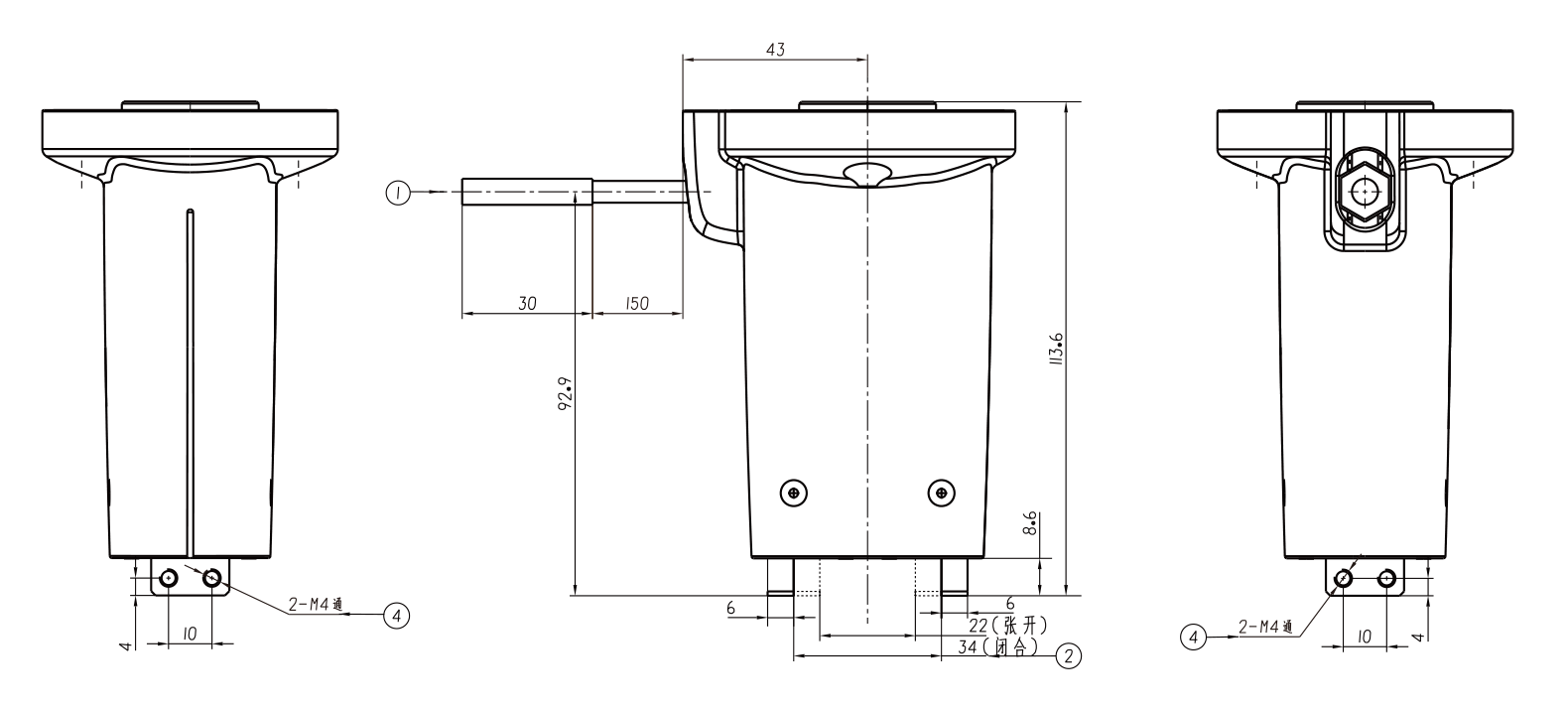
① RKMV8-354 Connecteur aviation à cinq broches vers RKMV8-354
② La course de la pince électrique est de qwmm
③ Position d'installation : utilisez deux vis M6 pour fixer la bride à l'extrémité du bras robotisé UR.
④ Position d'installation, position de montage de la fixation (vis M6)
Paramètres électriques
Tension nominale 24 ± 2 V
Courant 0,4 A

Notre entreprise


Catégories de produits
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-C5...
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-C3...
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-ECG-20...
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE PGE –...
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-26 Paral...
-

Pince servo-électrique DH ROBOTICS série CG – ...