Pince de préhension pour robot collaboratif – Pince souple interne ISC pour bras de cobot



Catégorie principale
Bras robotisé industriel / Bras robotisé collaboratif / Pince électrique / Actionneur intelligent / Solutions d'automatisation / Pince pour bras cobot / Pince souple / Pince pour bras robotisé
Application

Le dispositif de maintien interne ISC est un système souple innovant dont la conception s'inspire de la morphologie de défense du poisson-globe. Grâce à un gonflage à l'air sous pression, le dispositif se déploie et assure une préhension interne optimale.
Grâce à la matière en caoutchouc de silicone souple en contact avec la pièce à usiner, une couche de « coussin d'air » se forme entre le support rigide et la surface de contact après application de la pression, uniformisant ainsi la contrainte et réduisant les risques d'endommagement de la pièce. De plus, la pression d'air d'entrée est ajustable afin de contrôler le déploiement du coussin d'air et la contrainte exercée sur la pièce, ce qui améliore considérablement la souplesse du système de préhension.
Fonctionnalité

Médias moteurs : air pur
Durée de vie standard : > 100 000 fois
Fréquence de fonctionnement maximale (cpm) : 300
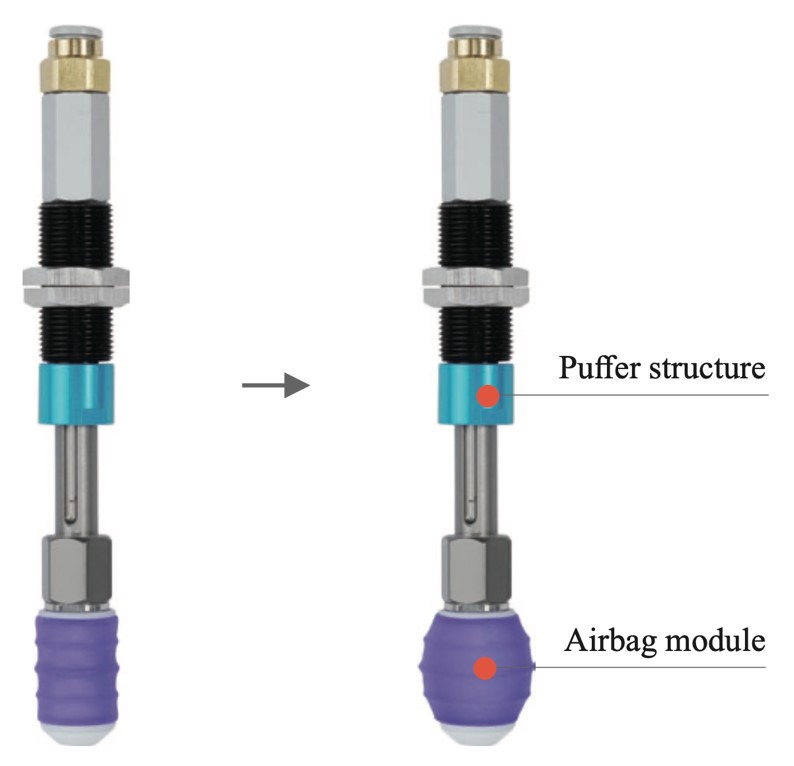
● La pince de support interne possède une structure spéciale d'airbag et peut produire différentes déformations en fonction de la pression interne.
● Pression positive d'entrée : le dispositif s'étend, s'adaptant automatiquement au support de la surface interne de l'objet et complétant la préhension.
● Pression négative d'entrée : le dispositif présente des états naturels et libère les objets.
Les pinces souples SFG ont été déployées avec des bras robotiques collaboratifs de classe mondiale, notamment :

Robot horizontal 4 axes (SCARA) Delta
Bras de robot industriel Nachi Fujikoshi
Robot parallèle (Delta) à 4 axes ABB
Robot collaboratif UR à 6 axes
Robot collaboratif à 6 axes AUBO



Paramètre de spécification
Le dispositif de fixation interne à coussin d'air ISC est un système souple innovant, dont la conception s'inspire de la morphologie de défense du poisson-globe. Grâce au gonflage d'air sous pression, le dispositif se déploie et assure un maintien interne optimal. Le contrôle précis de la pression d'air injectée permet de maîtriser la force de préhension exercée sur la pièce à usiner, évitant ainsi tout risque d'endommagement.
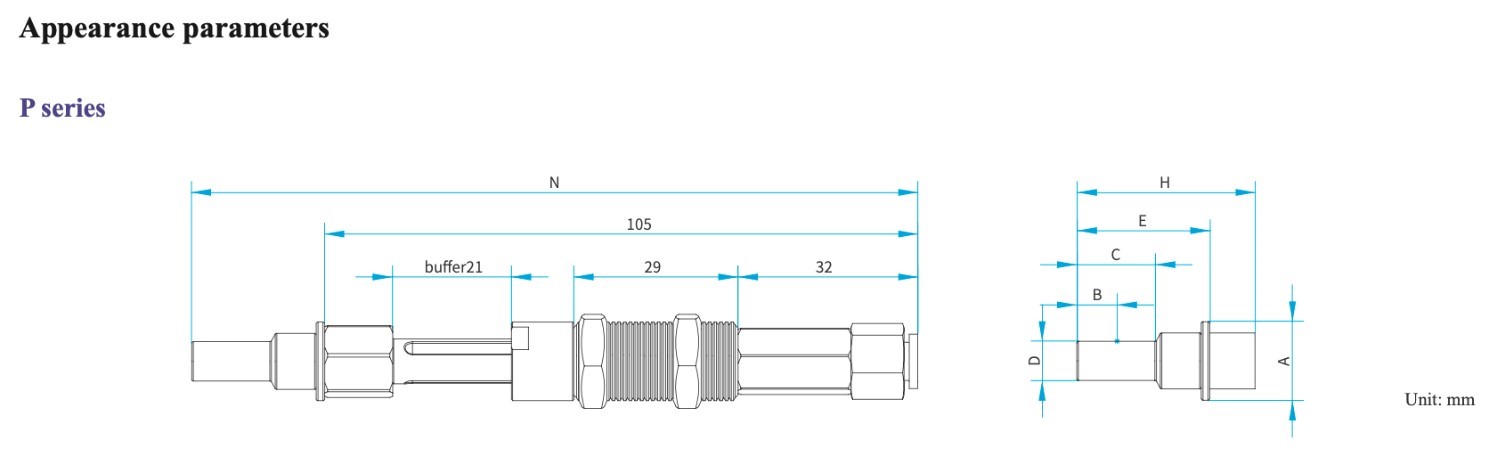
| Modèle | Hauteur totale du module d'airbag H | diamètre de la surface de contact D | Diamètre de la pièce structurelle A | Hauteur du diamètre utile au fond B | Hauteur de la surface de contact effective C | Hauteur de fonctionnement de l'airbag module E | Longueur totale N |
| ISC-P4.5E | 25,5 | 4.5 | 14 | 4 | 8 | 17,5 | E+105 |
| ISC-P5E | 27,5 | 5 | 14 | 5 | 10 | 19,5 | E+105 |
| ISC-P6E | 30,5 | 6 | 14 | 6 | 12 | 22,5 | E+105 |
| ISC-P7E | 31,5 | 7 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P8E | 31,5 | 8 | 14 | 7 | 14 | 23,5 | E+105 |
| ISC-P9E | 32,5 | 9 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P10E | 32,5 | 10 | 14 | 7,5 | 15 | 24,5 | E+105 |
| ISC-P11E | 34,5 | 11 | 14 | 7,5 | 15 | 26,5 | E+105 |
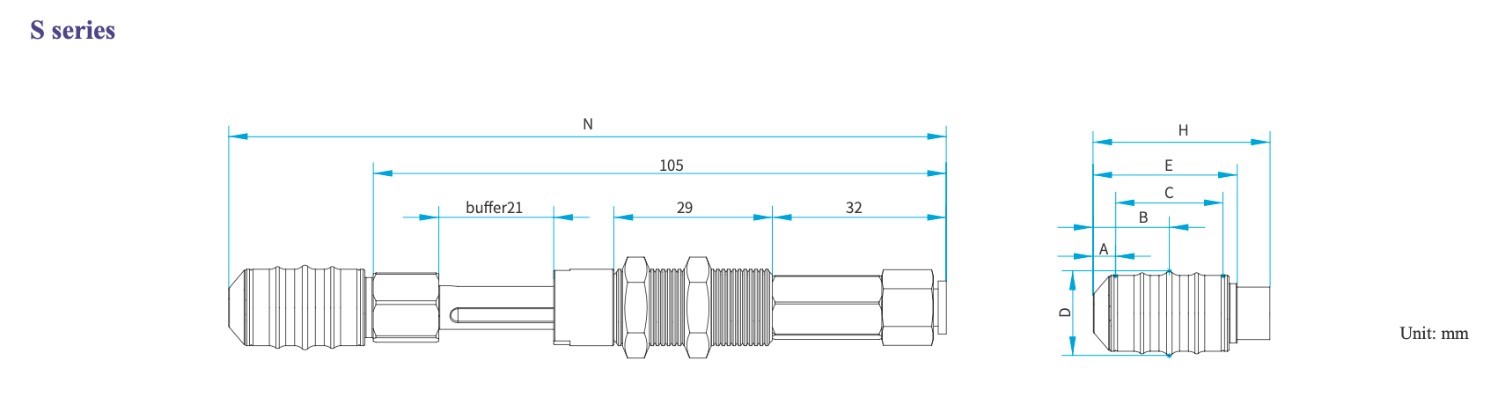
| Modèle | Hauteur totale du module d'airbag H | diamètre de la surface de contact D | hauteur de guide A | Hauteur du diamètre utile au fond B | Hauteur de la surface de contact effective C | Hauteur de fonctionnement de l'airbag module E | Longueur totale N |
| ISC-S14E | 32,5 | 14 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S15.5E | 32,5 | 15,5 | 4 | 14 | 20 | 26,5 | E+105 |
| ISC-S18E | 40,5 | 18 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S20.5E | 40,5 | 20,5 | 6 | 19 | 26 | 34,5 | E+105 |
| ISC-S23E | 40,5 | 23 | 6 | 19 | 26 | 34,5 | E+105 |
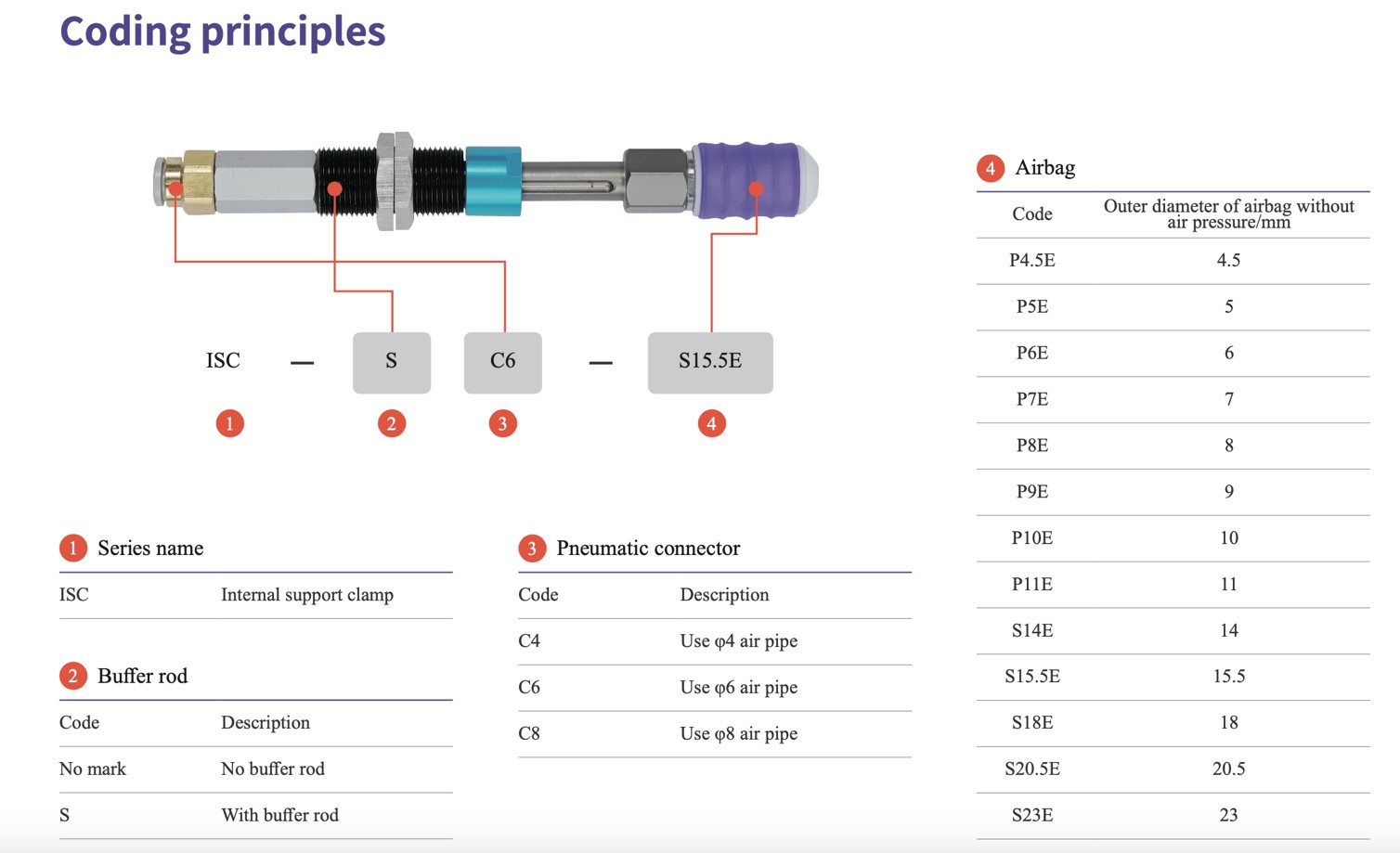
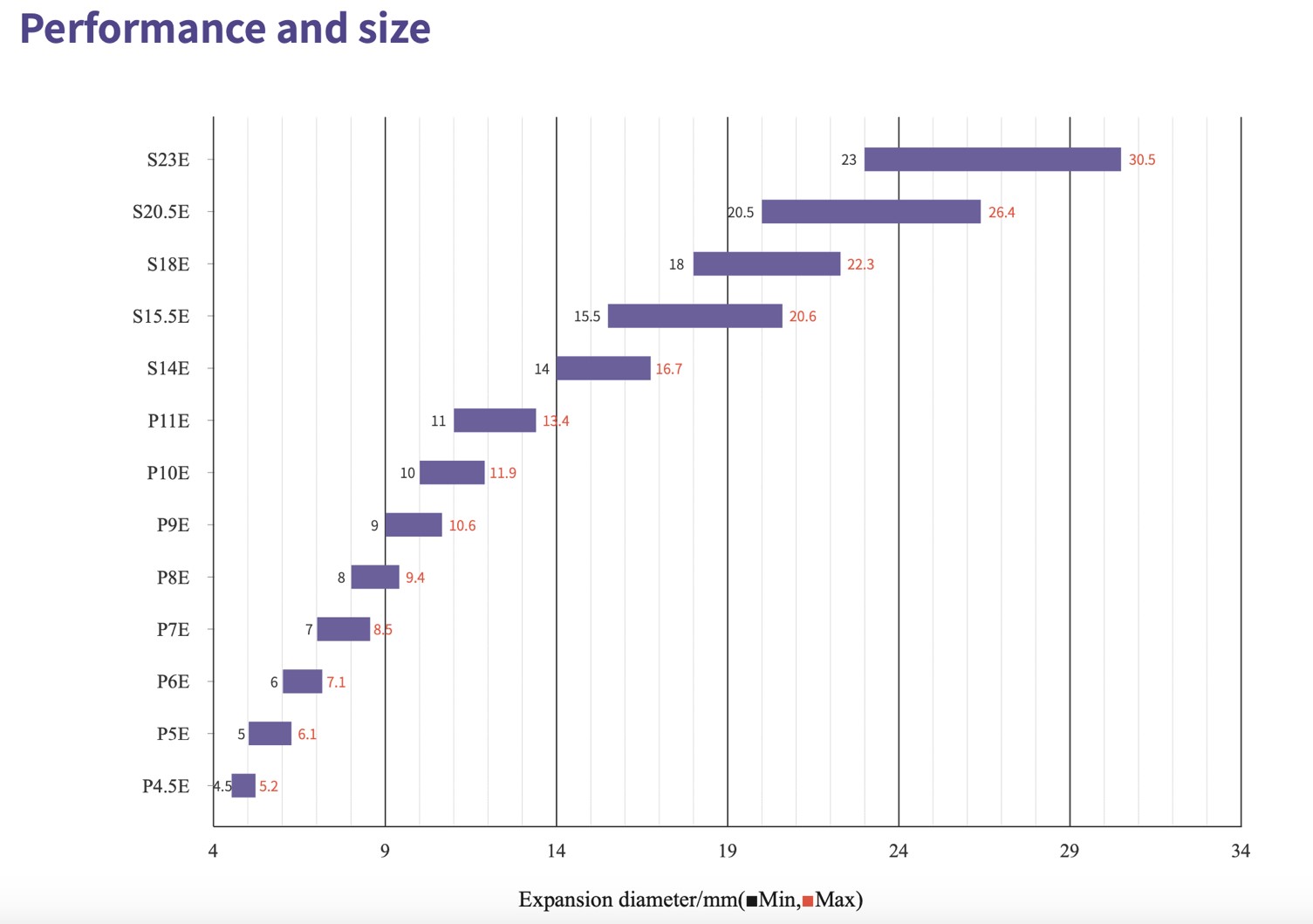
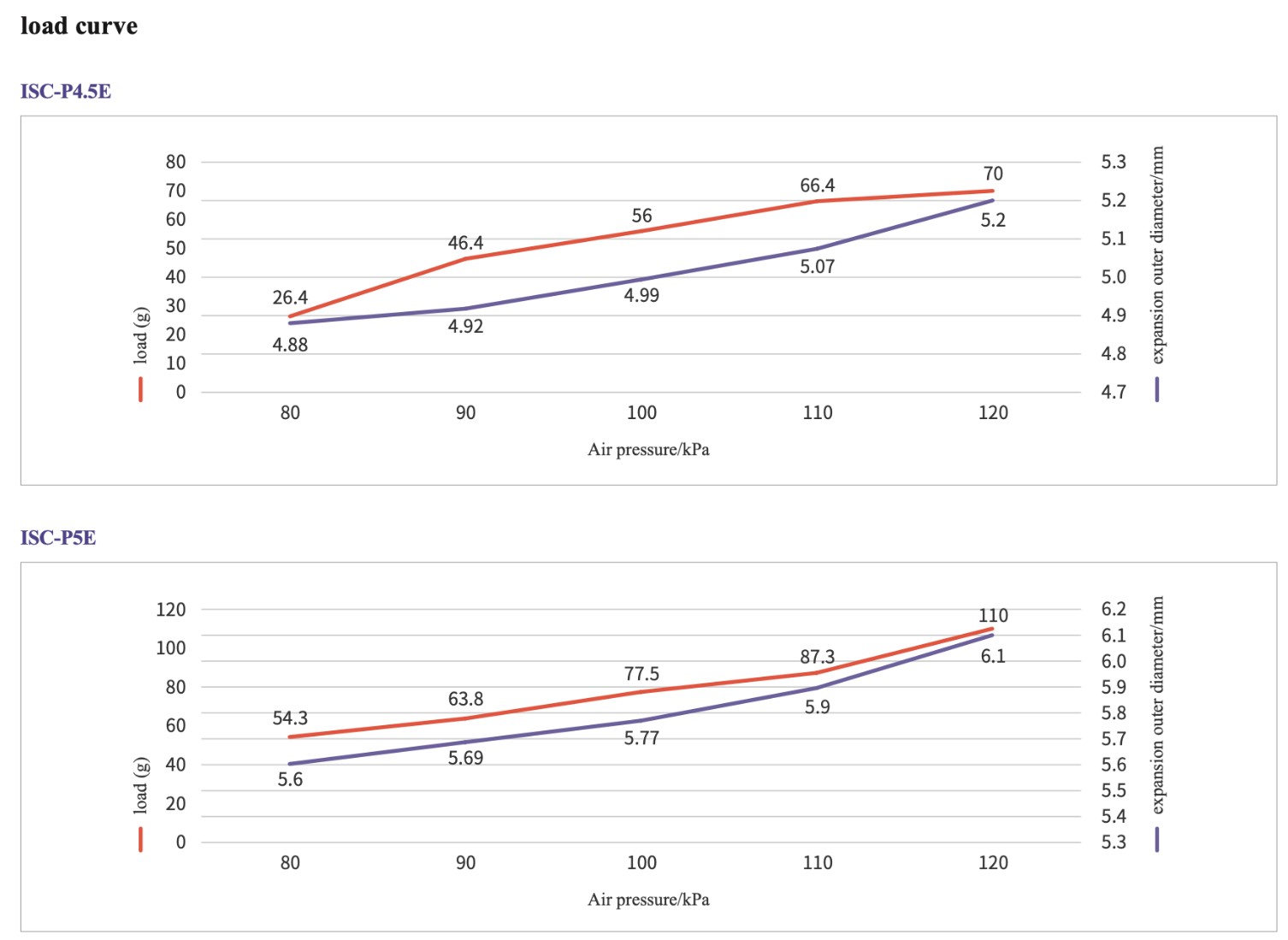
Diamètre extérieur élargi
| Modèle | Plage de pression de service /kPa | diamètre extérieur d'expansion maximale/mm | Charge maximale/g | Poids du dispositif/g | Modèle de tige métallique | Dimension du trou de fixation/mm |
| ISC-SC6-P4.5E | 0-120 | 5.2 | 70 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P5E | 0-120 | 6.1 | 110 | 36 | VFNT 1421-G18 | 14,5 |
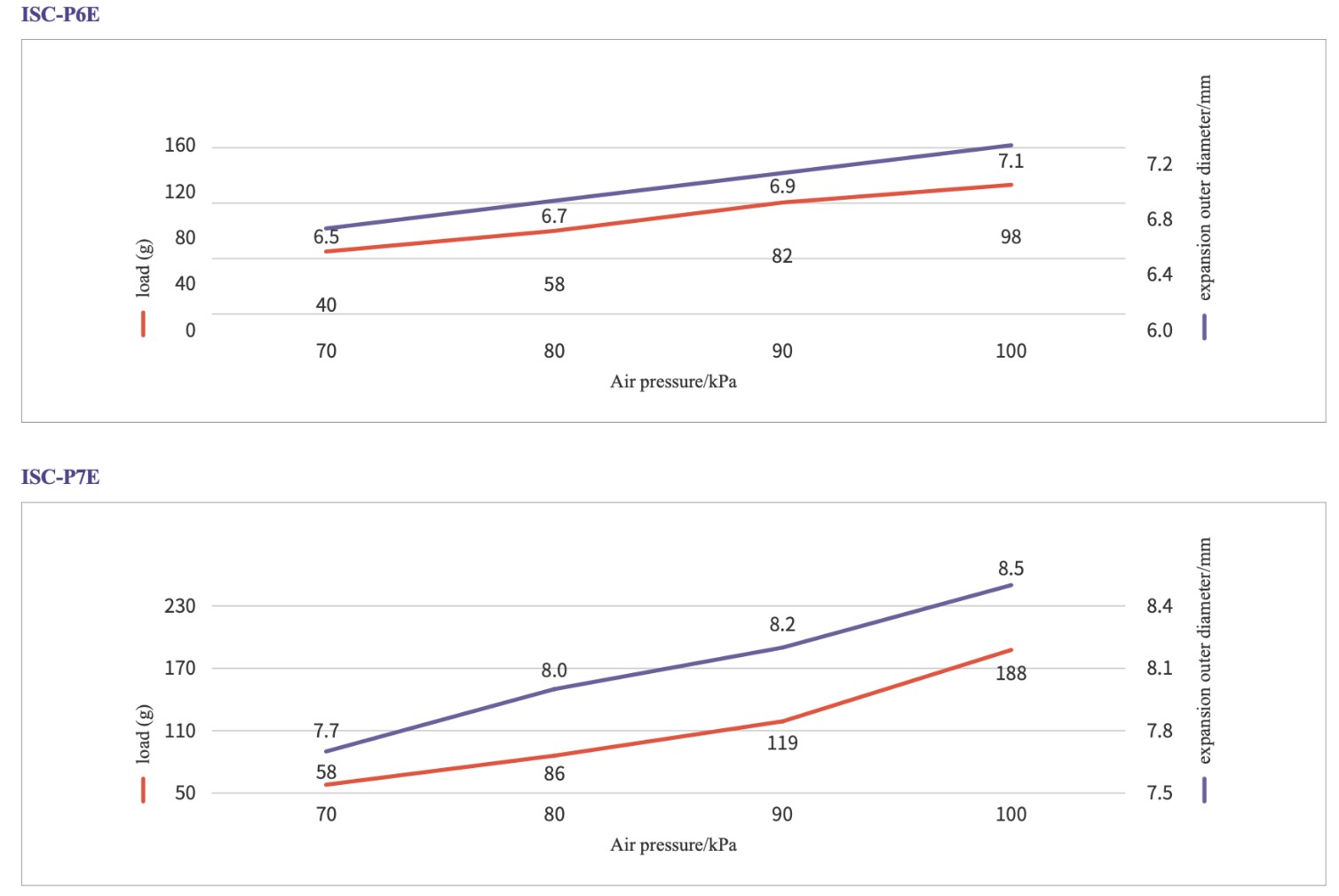
| ISC-SC6-P6E | 0-100 | 7.1 | 98 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P7E | 0-100 | 8.5 | 188 | 36 | VFNT 1421-G18 | 14,5 |
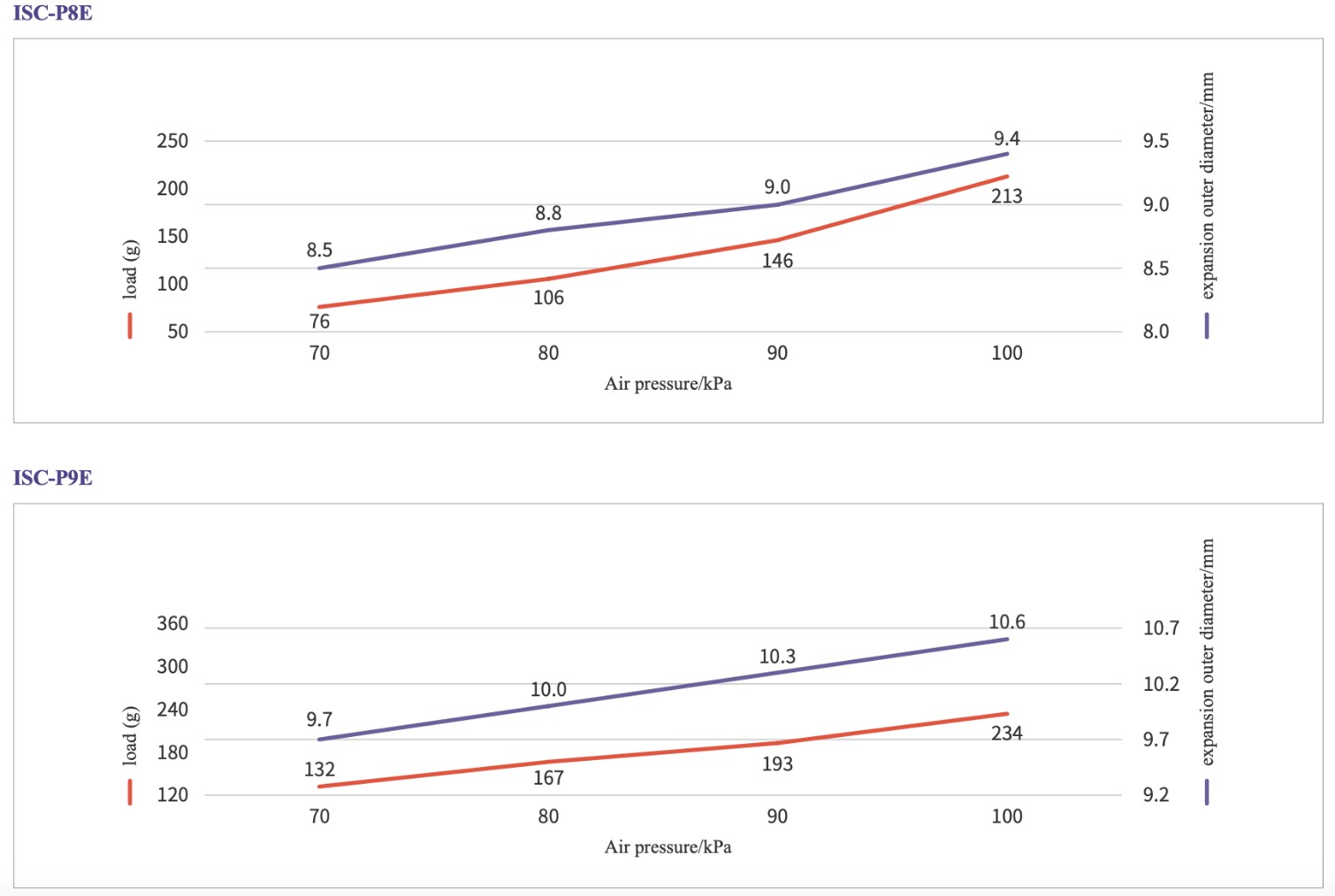
| ISC-SC6-P8E | 0-100 | 9.4 | 213 | 36 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P9E | 0-100 | 10.6 | 234 | 37 | VFNT 1421-G18 | 14,5 |
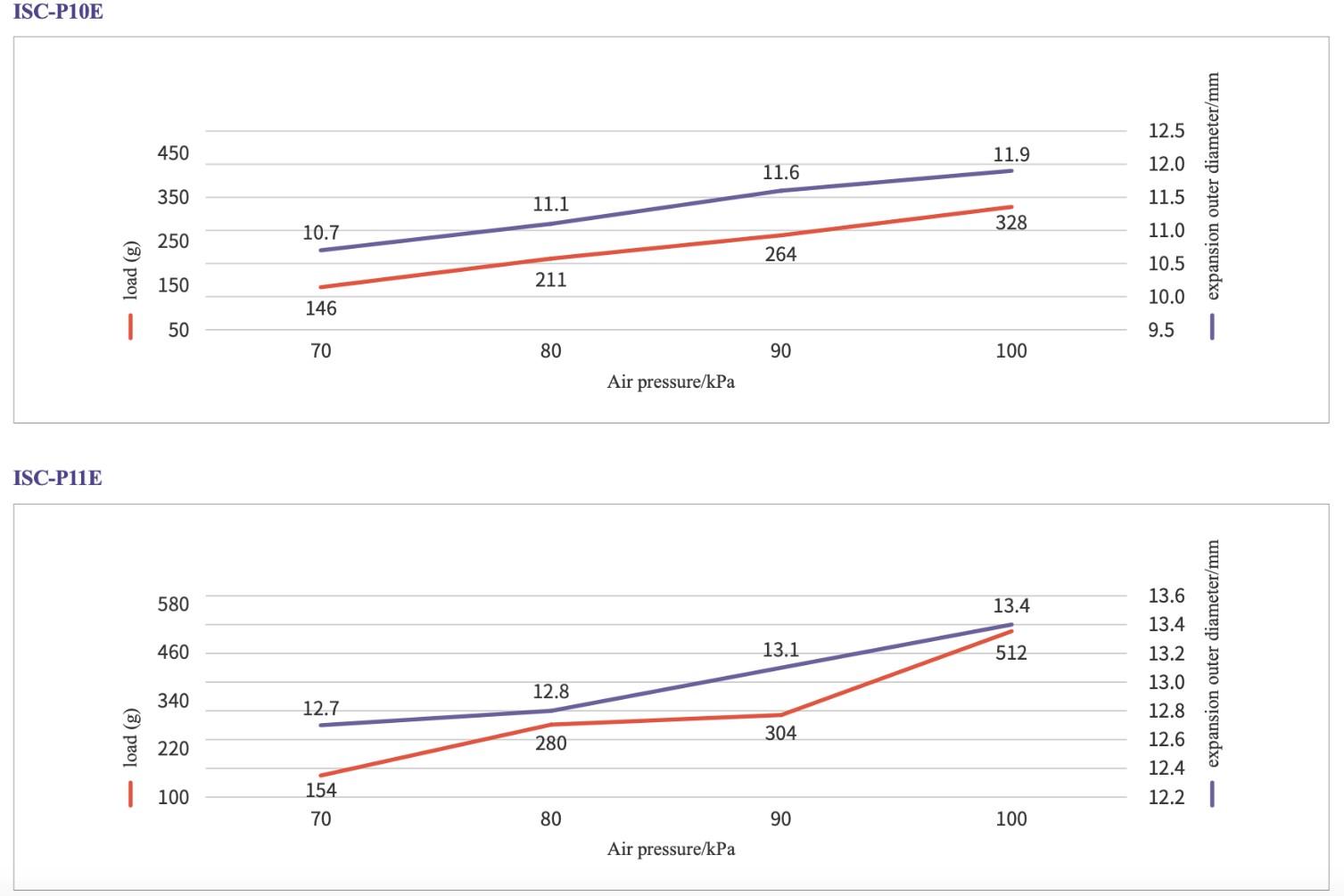
| ISC-SC6-P10E | 0-100 | 11.9 | 328 | 37 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-P11E | 0-100 | 13.4 | 512 | 38 | VFNT 1421-G18 | 14,5 |
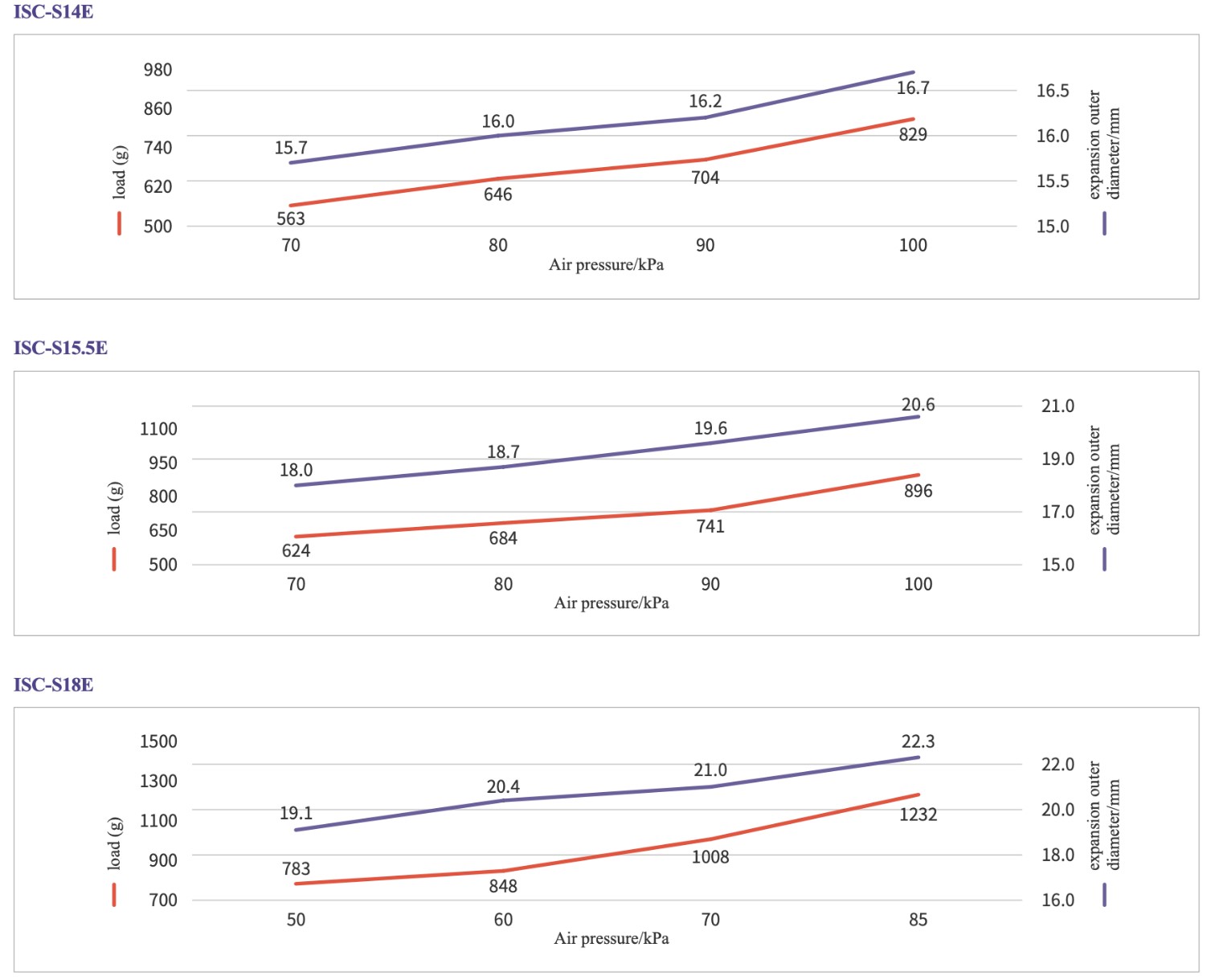
| ISC-SC6-S14E | 0-100 | 16.7 | 829 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S15.5E | 0-100 | 20.6 | 896 | 42 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S18E | 0-85 | 22.3 | 1232 | 47 | VFNT 1421-G18 | 14,5 |
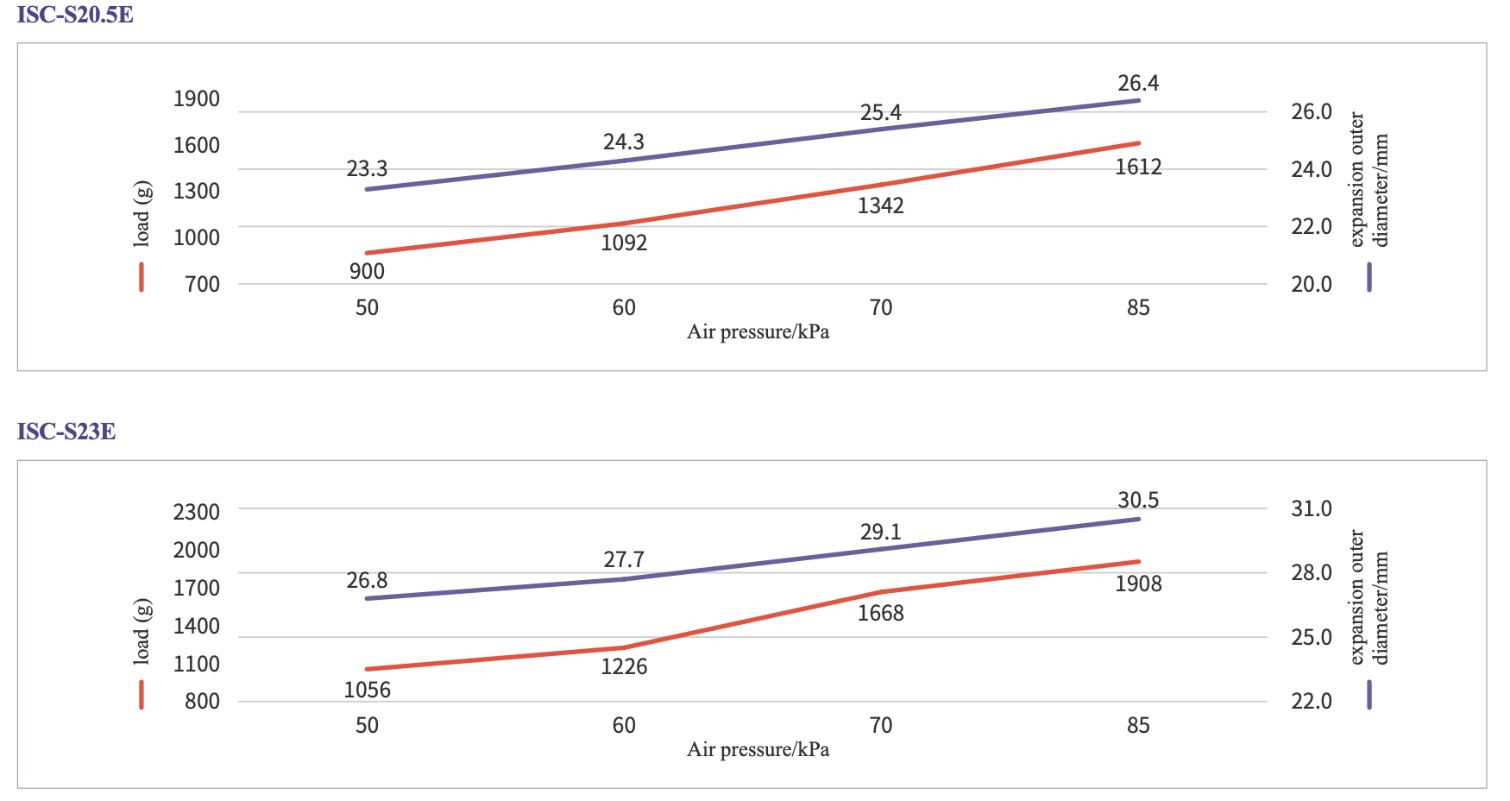
| ISC-SC6-S20.5E | 0-85 | 26.4 | 1612 | 49 | VFNT 1421-G18 | 14,5 |
| ISC-SC6-S23E | 0-85 | 30,5 | 1908 | 51 | VFNT 1421-G18 | 14,5 |
* Série P : l'objet du test de charge maximale est le diamètre extérieur du modèle + 0,3 mm ; Série S : l'objet du test de charge maximale est le diamètre extérieur du modèle + 1 mm ; Le test de charge est mesuré à l'aide d'instruments professionnels.
Notre entreprise


Catégories de produits
-

DH ROBOTICS SERVO-PIÈCE ÉLECTRIQUE SÉRIE RGD –...
-

SÉRIE DE PINCES ÉLECTRIQUES HITBOT – Z-EFG-13...
-

SÉRIE CHANGEUR RAPIDE – QCA-200-D1 Un rapide...
-

SÉRIE CHANGEUR RAPIDE – QC-200 Manuel rond...
-

SÉRIE CHANGEUR RAPIDE – QCA-S100 Un changeur rapide...
-

SÉRIE CHANGEUR RAPIDE – QCA-S500 Un changeur rapide...